Protocole SimpleCAN pour bus à base d’Arduino


Sujet initial du projet
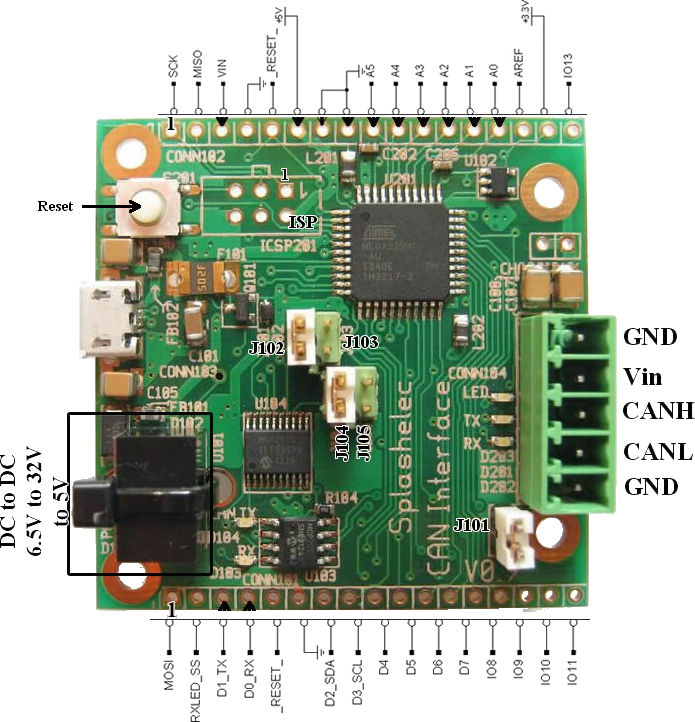
Le projet a pour objectif de définir une sur couche du protocole CAN, appelée SimpleCAN, pour faire communiquer entre eux un ensemble de nœuds composés de cartes Arduino associées à une interface CAN. L'approche devra être validée, au travers d'une application simple de visualisation et d'envoi de données via un PC, sur un matériel existant consistant en 5 nœuds : un permettant une connexion PC via USB, un destiné au décodage de données propriétaires SeaTalk (Raymarine), deux destinés à du traitement de données NMEA (issues d'un GPS et d'une centrale Tactick) et le dernier portant une centrale inertielle.
Objectif final
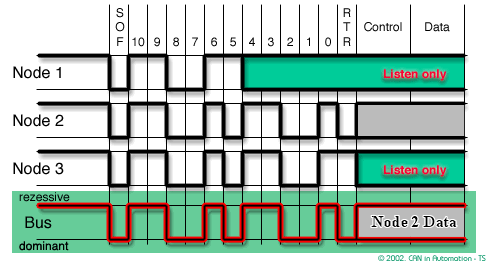
L'objectif du TER a été modifié, il consistait en un premier temps à évaluer l’intérêt du protocole SimpleCAN par rapport au protocole CAN standard et comparer la difficulté de mise en œuvre de ce protocole par rapport à sa mise en œuvre. Dans un second temps, il consistait à réutiliser 5 cartes Arduino et les faire communiquer via leur bus CAN intégré. Une des cartes servira d'interface USB entre le bus CAN et le pc pour récupérer les données des capteurs du réseau.
Le but de départ était d'essayer d'utiliser les travaux réaliser par Kévin Bruget, étudiant en 2013 à l'ENSTA Bretagne, pour son son projet de fin d'études pour lequel il avait étudié la possibilité de remplacer un système d'assistance à la navigation centraliser par un système réparti via un réseau CAN à base de carte Arduino.
Le projet c'est déroulé de la façon suivante, prise en main des documents fournit, le rapport du projet présentant le protocole SimpleCAN, puis la prise en main des cartes Arduino, la sélection d'une librairie CAN pour mettre en réseaux les cartes et débogage de leur fonctionnement.
Le but final était d'avoir un réseaux CAN fonctionnelle permettant de récupérer sur la carte interface USB les données des autres capteurs de façon simple et d'expliquer le fonctionnement des cartes, la méthode pour les programmés et de proposer des méthodes pour récupérer les données fournit par les capteurs.
Les codes de test pour les cartes et certain document utiliser lors du TER sont disponibles sur le dépôt GitHubdont le lien est fourni dans la partie détail.
Détails du Project
Date: Mai-Juin 2015
Développeur: Romain Le Forestier
Encadrant: Goulven Guillou, Bernt Weber
Catégories: Embarqué
is_single